Localization
A recent spur of interest in indoor robotics has increased the importance of robust simultaneous localization and mapping algorithms in indoor scenarios. This robustness is typically provided by the use of multiple sensors which can correct each others’ deficiencies. In this vein, exteroceptive sensors, like cameras and LiDAR’s, employed for fusion are capable of correcting the drifts accumulated by wheel odometry or inertial measurement units (IMU’s). However, these exteroceptive sensors are deficient in highly structured environments and dynamic lighting conditions. This letter will present WiFi as a robust and straightforward sensing modality capable of circumventing these issues. Specifically, we make three contributions. First, we will understand the necessary features to be extracted from WiFi signals. Second, we characterize the quality of these measurements. Third, we integrate these features with odometry into a state-of-art GraphSLAM backend. We present our results in a 25×30 m and 50×40 environment and robustly test the system by driving the robot a cumulative distance of over 1225 m in these two environments. We show an improvement of at least 6× compared odometry-only estimation and perform on par with one of the state-of-the-art Visual-based SLAM.
Aditya Arun, Roshan Ayyalasomayajula, William Hunter, Dinesh Bharadia
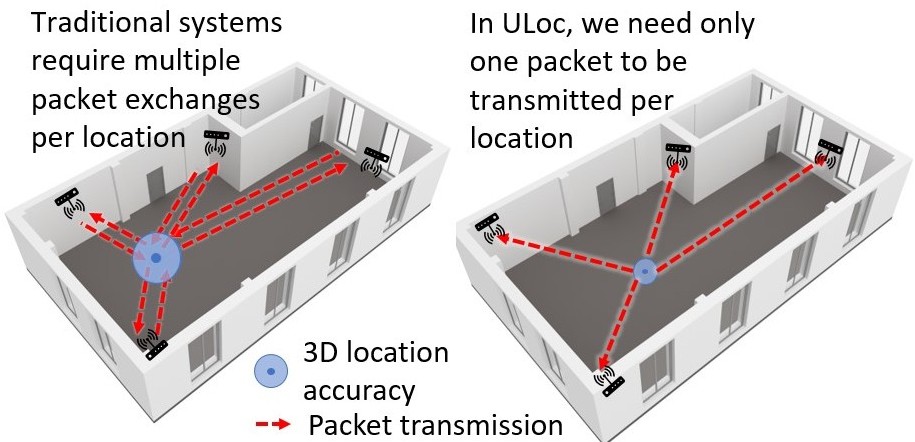
A myriad of IoT applications demand centimeter-accurate localization that is robust to blockages from hands, furniture, or other occlusions in the environment. To address these needs, we developed ULoc, a scalable, low-power, and cm-accurate UWB localization and tracking system. ULoc’s builds a multi-antenna UWB anchor and develops a novel 3D tracking algorithm to deliver a stationary localization accuracy of less than 5 cm and a tracking accuracy of 10 cm in mobile conditions.
Minghui Zhao, Tyler Chang, Aditya Arun, Roshan Ayyalasomayajula, Chi Zhang, Dinesh Bharadia
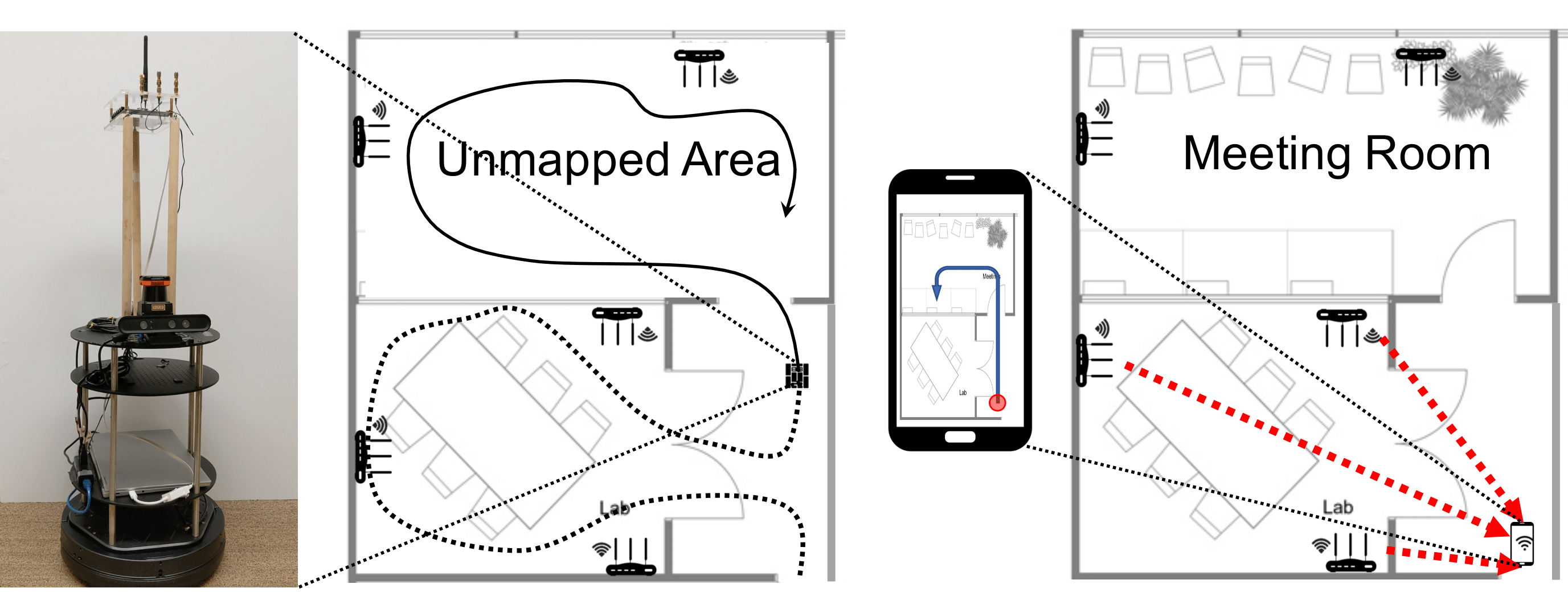
Location services, fundamentally, rely on two components- a mapping system and a positioning system. The mapping system provides the physical map of the space, and the positioning system identifies the position within the map. Outdoor location services have thrived over the last couple of decades because of well-establishedplatforms for both these components (e.g. Google Maps for mapping, and GPS for positioning). In contrast, indoor location services haven’t caught up because of the lack of reliable mapping and positioning frameworks, as GPS is known not to work indoors. WiFi positioning lacks maps and is also prone to environmental errors. In this paper, we present DLoc, a Deep Learning based wireless localization algorithm that can overcome traditional limitations of RF-based localization approaches (like multipath, occlusions, etc.). DLoc uses data from the mapping platform we developed, MapFind, that can construct location-tagged maps of the environment. Together, they allow off-the-shelf WiFi devices like smartphones toaccess a map of the environment and to estimate their position withrespect to that map. During our evaluation, MapFind has collected location estimates of over 120 thousand points under 10 different scenarios across two different spaces covering 2000 sq. Ft. DLoc outperforms state-of-the-art methods in WiFi-based localizationby 80% (median and 90th percentile) across the 2000 sq. ft. spanningtwo different spaces.
Roshan Ayyalasomayajula, Aditya Arun, Chenfeng Wu, Sanatan Sharma, Abhishek Sethi, Deepak Vasisht, and Dinesh Bharadia
[LocAP-Webpage] [paper] [slides]
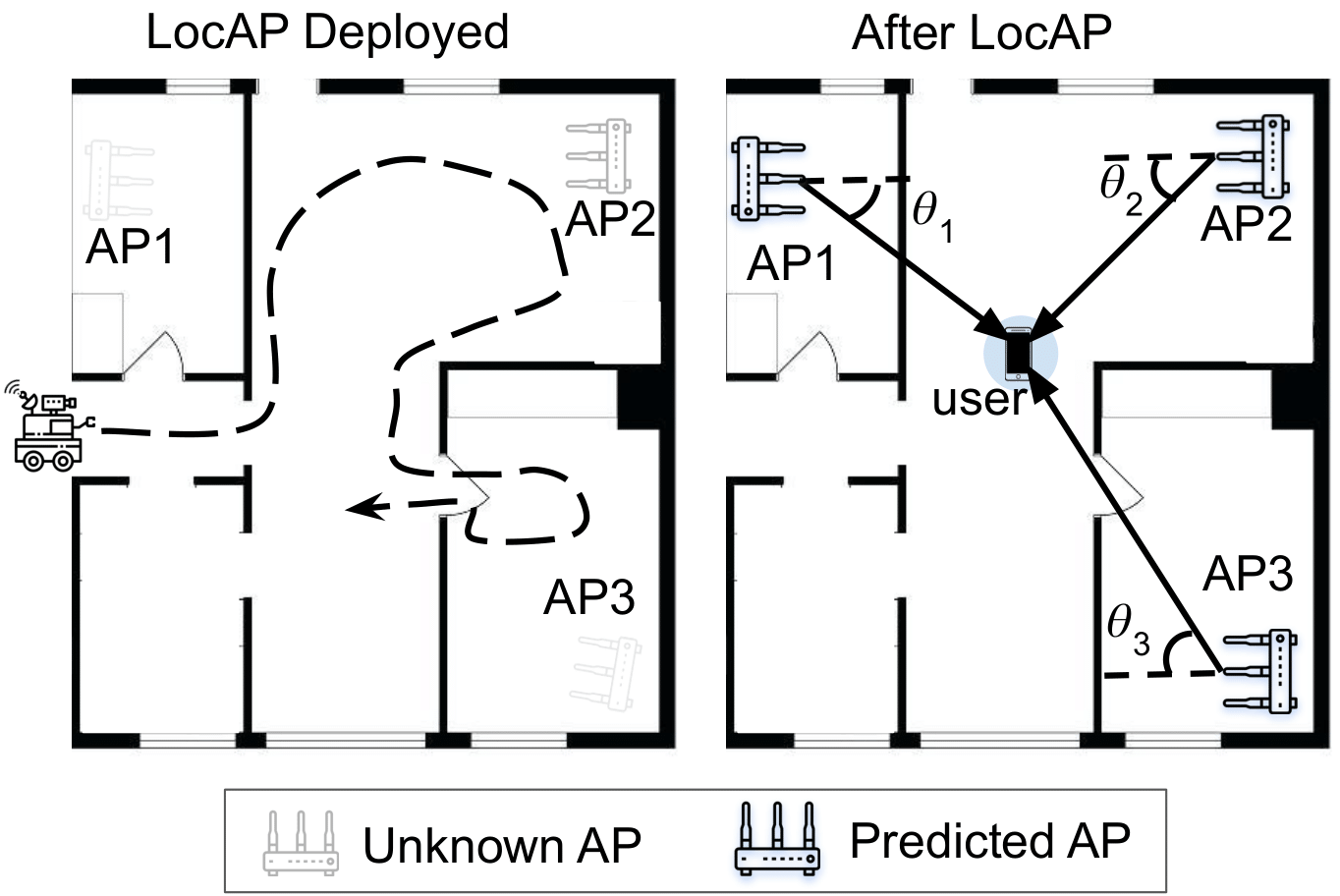
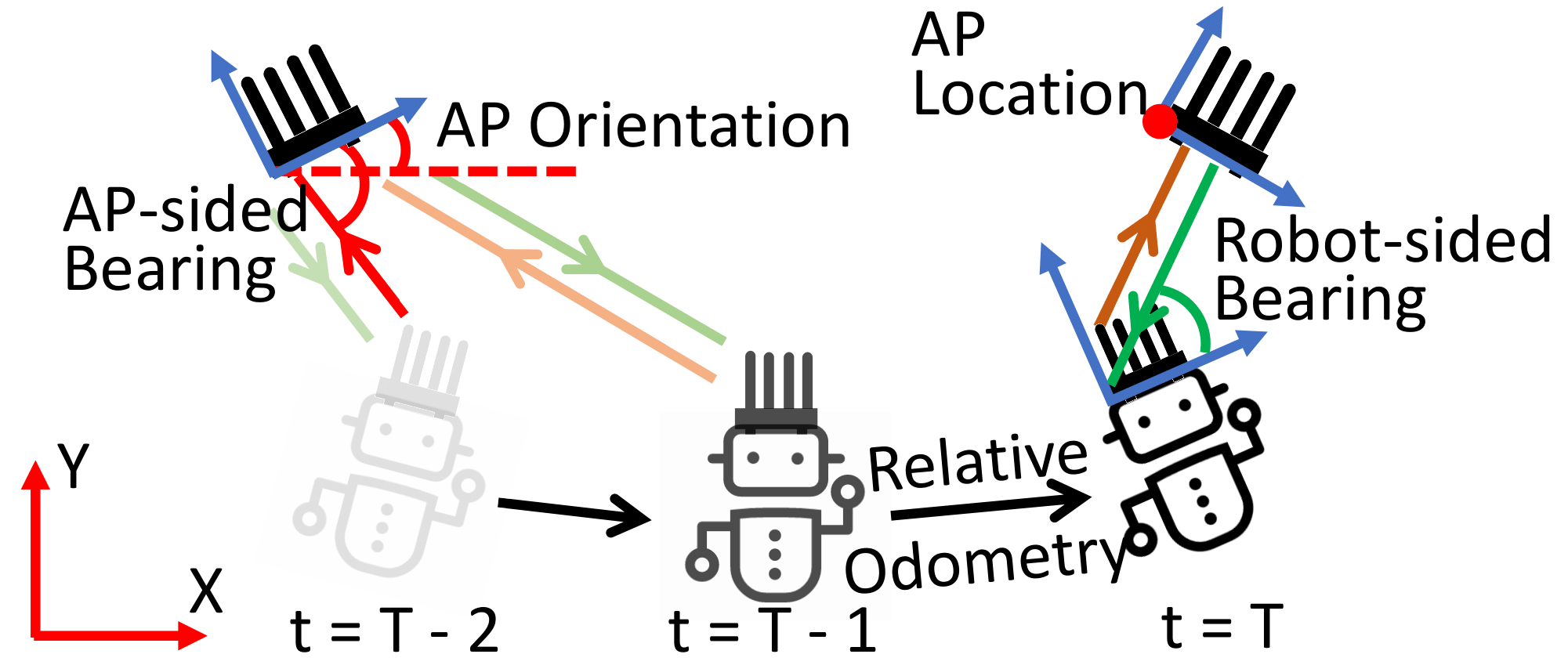
Indoor localization has been studied for nearly two decades fueled by wide interest in indoor navigation, achieving the necessary decimeter-level accuracy. However, there are no real-world deployments of WiFi-based user localization algorithms, primarily because these algorithms are triangulation based and therefore assume the location of the Access Points, their antenna geometries, and deployment orientations in the physical map. In the real world, such detailed knowledge of the location attributes of the Access Point is seldom available, thereby making WiFi localization hard to deploy. In this paper, for the first time, we establish the accuracy requirements for the location attributes of access points to achieve decimeter level user localization accuracy. Surprisingly, these requirements for antenna geometries and deployment orientation are very stringent, requiring millimeter level and sub-10 degree of accuracy respectively, which is hard to achieve with manual effort. To ease the deployment of real-world WiFi localization, we present LocAP, which is an autonomous system to physically map the environment and accurately locate the attributes of existing infrastructure AP in the physical space down to the required stringent accuracy of 3 mm antenna separation and 3degree deployment orientation median errors, whereas state-of-the-art report 150 mm and 25degrees respectively.
Shrivatsan Rajagopalan, Shreya Ganesaraman, Aravind Seetharaman, Roshan Ayyalasomayajula, Aditya Arun, Chenfeng Wu, and Dinesh Bharadia
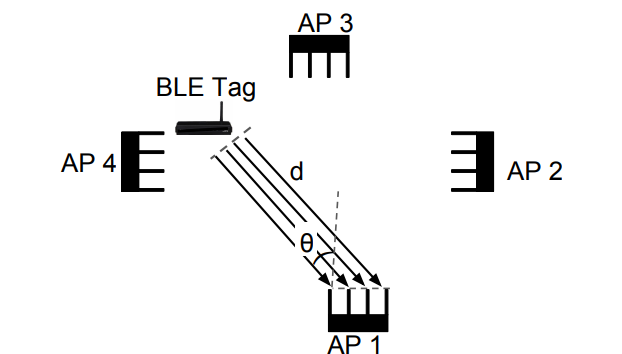
Bluetooth Low Energy (BLE) tags have become very prevalent over the last decade for tracking applications in homes as well as businesses. These tags are used to track objects, navigate people, and deliver contextual advertisements. However, in spite of the wide interest in tracking BLE tags, the primary methods of tracking them are based on signal strength (RSSI) measurements. Past work has shown that such methods are inaccurate, and prone to multipath and dynamic environments. As a result, localization using Wi-Fi has moved to Channel State Information (CSI, includes both signal strength and signal phase) based localization methods. In this paper, we seek to investigate what are the challenges that prevent BLE from adopting CSI based localization methods. We identify fundamental differences at the PHY layer between BLE and Wi-Fi, that make it challenging to extend CSI based localization to BLE. We present our system, BLoc, that incorporates novel, BLE-compatible algorithms to overcome these challenges and enable an accurate, multipath-resistant localization system. Our empirical evaluation shows that BLoc can achieve a localization accuracy of 86 cm with BLE tags, a 3X improvement over a state-of-the-art baseline.
Roshan Ayyalasomayajula, Deepak Vasisht, and Dinesh Bharadia
This paper presents the design and implementation of SpotFi, an accurate indoor localization system that can be deployed on commodity WiFi infrastructure. SpotFi only uses information that is already exposed by WiFi chips and does not require any hardware or firmware changes, yet achieves the same accuracy as state-of-the-art localization systems. SpotFi makes two key technical contributions. First, SpotFi incorporates super-resolution algorithms that can accurately compute the angle of arrival (AoA) of multipath components even when the access point (AP) has only three antennas. Second, it incorporates novel filtering and estimation techniques to identify AoA of direct path between the localization target and AP by assigning values for each path depending on how likely the particular path is the direct path. Our experiments in a multipath rich indoor environment show that SpotFi achieves a median accuracy of 40 cm and is robust to indoor hindrances such as obstacles and multipath.
Manikanta Kotaru, Kiran Joshi, Dinesh Bharadia, Sachin Katti
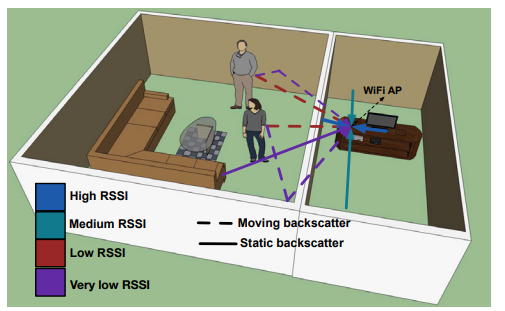
Could we build a motion tracing camera using wireless communication signals as the light source? This paper shows we can, we present the design and implementation of WiDeo, a novel system that enables accurate, high resolution, device free human motion tracing in indoor environments using WiFi signals and compact WiFi radios. The insight behind WiDeo is to mine the backscatter reflections from the environment that WiFi transmissions naturally produce to trace where reflecting objects are located and how they are moving. We invent novel backscatter measurement techniques that work in spite of the low bandwidth and dynamic range of WiFi radios, new algorithms that separate out the moving backscatter from the clutter that static reflectors produce and then trace the original motion that produced the backscatter in spite of the fact that it could have undergone multiple reflections. We prototype WiDeo using off-the-shelf software radios and show that it accurately traces motion even when there are multiple independent human motions occurring concurrently (up to 5) with a median error in the traced path of less than 7cm.
Kiran Joshi, Dinesh Bharadia, Manikanta Kotaru, Sachin Katti

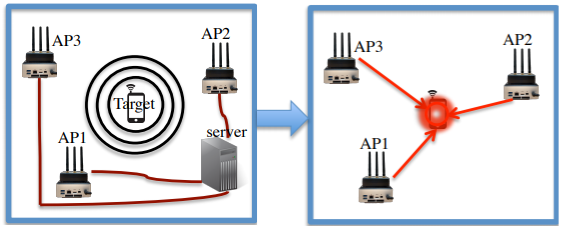
We describe SpotOn, an accurate indoor localization system that works using existing WiFi access point infrastructure. SpotOn does not require any software or hardware modifications at the access points or the radio that needs to be located. Thus, SpotOn presents a case for widely deployable indoor localization system. SpotOn requires just a WiFi radio to be present on the target device to be located and can accurately localize even when the target device is stationary. This expands the application scenarios of SpotOn indoor localization system beyond localizing mobile devices carried by humans. SpotOn achieves localization using Channel State Information (CSI) calculated for each packet during regular WiFi OFDM communication. SpotOn owes its accuracy to its super-resolution algorithms to estimate the direction of the target device and novel triangulation algorithms which combine measurements from different WiFi access points to estimate the location of the transmitter. We implemented SpotOn using commercial off-the-shelf Intel 5300 WiFi NICs. SpotOn achieves localization accuracy of 0.6 m when the target device has significant number of access points in line-of-sight. Over all the locations in our test runs, SpotOn achieves localization accuracy of 1.5 m
Manikanta Kotaru, Kiran Joshi, Dinesh Bharadia, Sachin Katti