
Research Vision
The core aspect of delivering physical intelligence lies in determining a device's location. The content displayed on a phone can be customized according to its location, a robot's actions are dictated by its spatial coordinates, and buildings may adjust their HVAC systems to enhance user experience. In a broader context, leveraging physical intelligence allows us to fine-tune a device's general intelligence and cultivate situational awareness.
While general intelligence, mainly driven by LLMs and foundational ML models, demands substantial data and innovative network architectures to capture similarities, I anticipate that endowing our devices and systems with "physical intelligence" will necessitate a comprehensive understanding of the environment. This involves developing and implementing systems to gather such data, all while prioritizing security and privacy. My overarching research goal is to integrate physical intelligence into robotics, mobile devices, and smart building systems.
I am currently on the job market and here are my research statement and teaching statement. More details about my projects can also be found below.
Updates
- [Presentation] Our work in developing localization system for next-gen applications was accepted at Sensys 2023. XRLoc which is cm-accurate, easily deployable and supports hundred's of tags will be presented at the conference in Turkey during "Tech Session 2, Localization I". More details are here.
- [Presentation] I had the opporutnity to present some of my in-progress work on wireless time synchronization at Open Compute Project Global Summit, 2023. This work is in collaboration with Nobuyashi Shiga at NICT and Julian St. James at Meta. A recording of this talk can be found here.
- [Presentation] I presented my work on building WiFi-centric, compute and memory effecieint SLAM systems at Texas A&M Univeristy's Computer Engineering and Sytems Group seminar. More details are here.
- [Demo] I am demoing our open sourced WiFi-sensing platform at IPSN 2023. More information about the project is here. [GitHub] . Feel free to contact me for further details!
- [Outreach] We recently collaborated in hosting HardHack, UCSD's premier hackathon. We provided the systems open sourced in WiROS to undergraduate students and our team supported them throughout the 24 hour hackathon event!
- [Talk] I recently presented my work at University of Washington, Google Research and Microsoft Research. A recording of my talk is here.
- [Demo] We are demoing extensions on our UWB-tracking project at Mobisys 2022. More details can be found here
- [Presentation] I presented my work, P2SLAM, at ICRA, Sensor fusion track. It was recently accepted jointly with RAL-2022
- [Media] Our WiFi sensor fusion work, P2SLAM, was covered by Science Daily, Cosmos, EurekaAlert and UCSD News. The featured video can be found here.
- [Presentation] I presented our work BluBLE at Sensys 2020 Poster session. The work developed a Covid-19 contact tracing application using BLE signals which is robust to false positives that are common with other contact tracing applications.
- [Media] Our work in developing BluBLE, an improved COVID-19 contact tracing application, was feature in the The San Diego Union-Tribune and UCSD News
- [Presentation] I presented my early work in developing WiFi assisted closed-loop SLAM at NSDI 2020 Poster session . More details can be found in the poster abstract .
Projects
Localization systems for next generation spatial computing applications
Understanding the location of ultra-wideband (UWB) tag-attached objects and people in the real world is vital to enabling a smooth cyber-physical transition. However, most UWB localization systems today require multiple anchors in the environment, which can be very cumbersome to set up. In this work, we develop XRLoc, providing an accuracy of a few centimeters in many real-world scenarios. This paper will delineate the key ideas that allow us to overcome the fundamental restrictions that plague a single anchor point from localization of a device to within an error of a few centimeters.
-
XRLoc: Accurate UWB Localization to Realize XR Deployments
Aditya Arun*, Shunsuke Saruwatari*, Sureel Shah, Dinesh Bharadia
Sensys 2023
Presented at Sensys 2023
[Paper]-[Demo]
WiFi radios as extrinsic sensors for Robot SLAM
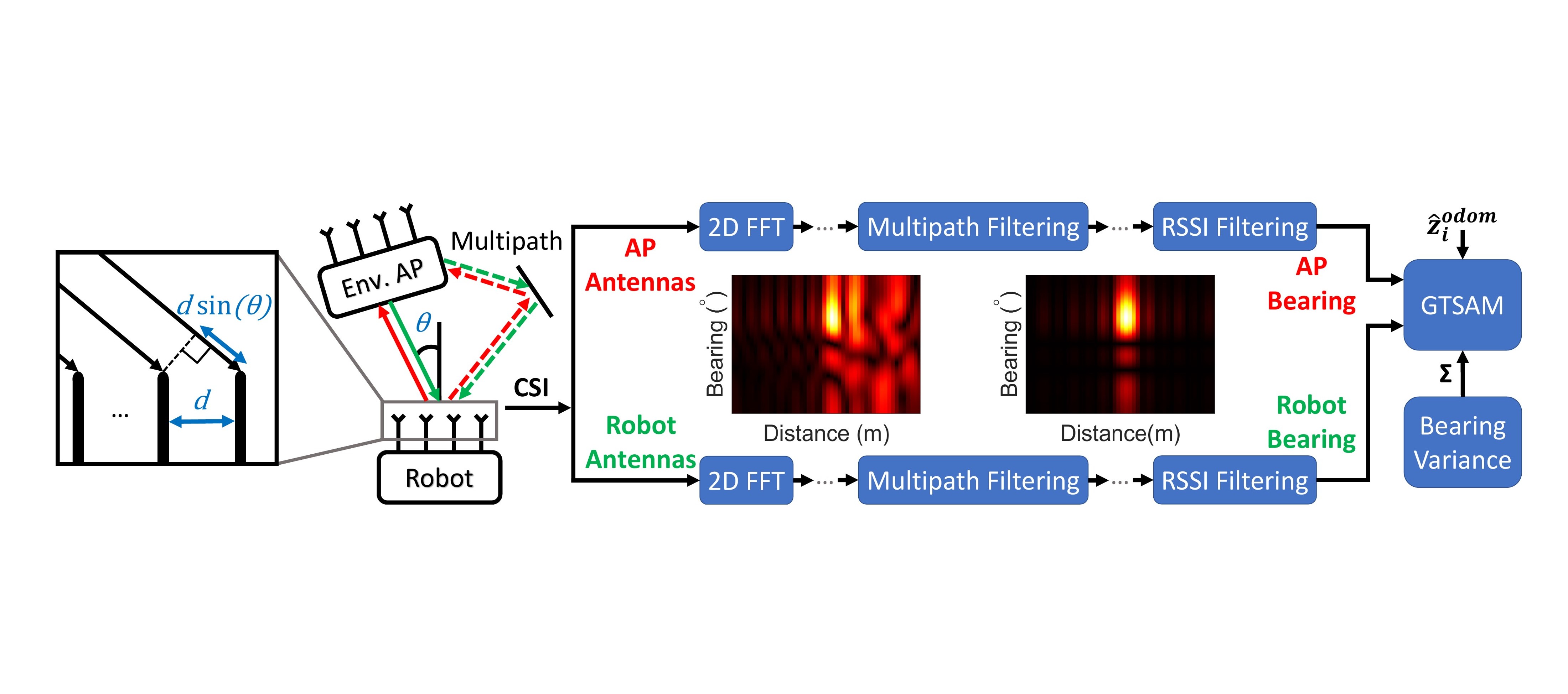
Extrinsic sensors, like cameras and LiDAR’s, employed for fusion can correct the the drifts accumulated by wheel odometry or inertial measurement units (IMU’s) for robot localization and mapping. However, these exteroceptive sensors are deficient in highly structured environments and dynamic lighting conditions. We present WiFi as a robust and straightforward sensing modality capable of circumventing these issues.
-
P2SLAM: Bearing based WiFi SLAM for Indoor Robots
Aditya Arun, Roshan Ayyalasomayajula, William Hunter, Dinesh Bharadia
RAL 2022
Presented at ICRA 2022
[Paper]-[4-min video ] -
ViWiD: Leveraging WiFi for Robust and Resource-Efficient SLAM
Aditya Arun, William Hunter, Roshan Ayyalasomayajula, Dinesh Bharadia
Arxiv 2022
[Paper] -
WiROS: WiFi sensing toolbox for robotics
Aditya Arun*, William Hunter*, Dinesh Bharadia
Arxiv 2023
Presented at IPSN 2023 Demo session
[Full Paper]-[Demo Abstract]-[Code]-[Demo]
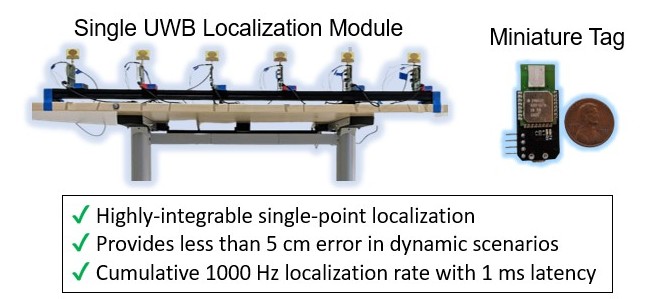
cm-Accurate, Real time, and scalable UWB based Indoor 3D Localization
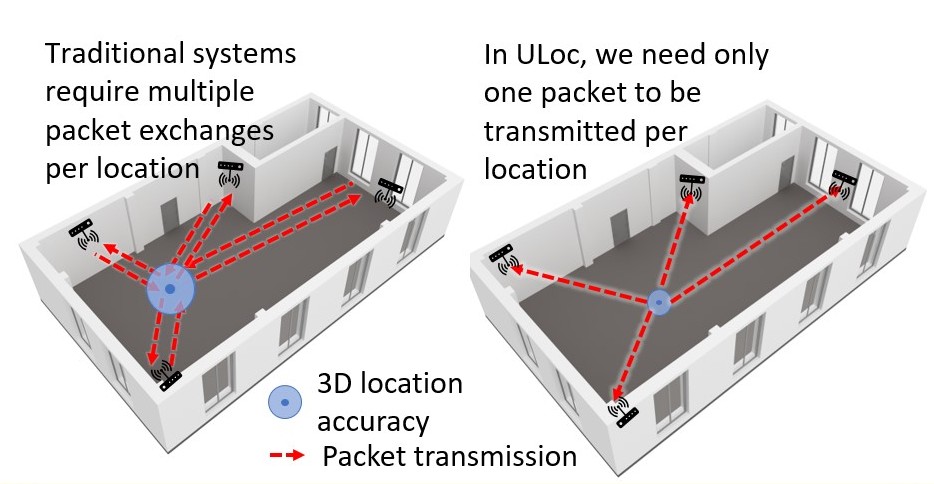
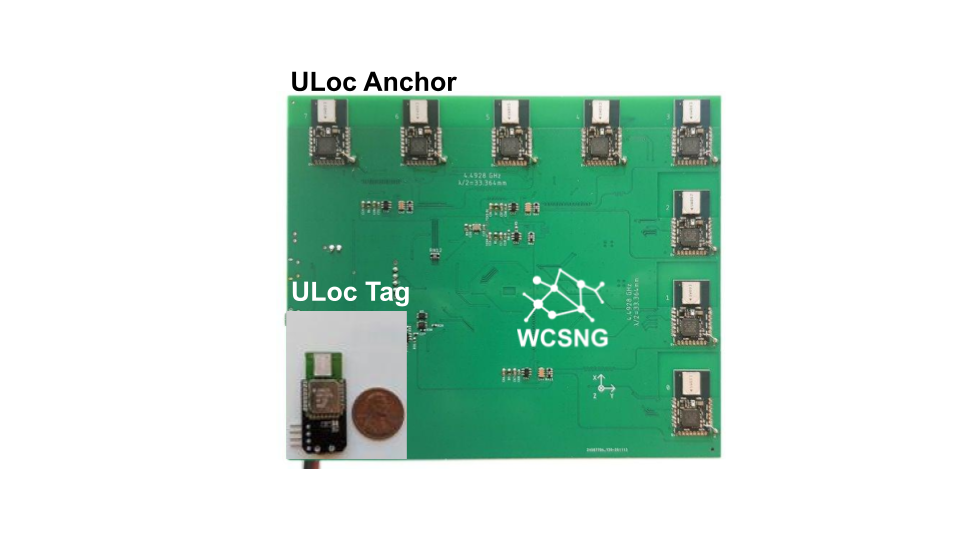
Since UWB has been developed as localization specific protocol, there has been a need for infrastructure based, low-power and real-time indoor localization while providing cm-Accurate 3D UWB tag locations. We solve these problems by novel hardware, firmware and algorithm designs. We are designing our custom UWB anchor hardware and firmware that enables accurate 3D AoA measurement to get cm-accurate 3D locations using our novel algorithms.
- ULoc: Low-Power, Scalable and cm-Accurate UWB-Tag Localization and Tracking for Indoor Applications
Minghui Zhao, Tyler Chang, Aditya Arun , Roshan Ayyalasomayajula, Chi Zhang, Dinesh Bharadia
IMWUT, 2021
Presented at Ubicomp, 2021
[Paper]-[20-min video]-[6-min video]-[Demo 1]-[Demo 2]-[Source] - Demo: Real-Time Low-Latency Tracking for UWB tags. In Proceedings of the 20th Annual International Conference on Mobile Systems, Applications, and Services
Aditya Arun, Tyler Chang, Yizheng Yu, Roshan Ayyalasomayajula, Dinesh Bharadia
Mobisys, 2022
Presented at Mobisys, 2022
[Paper]-[Video]
Physical-layer Privacy from WiFi localization
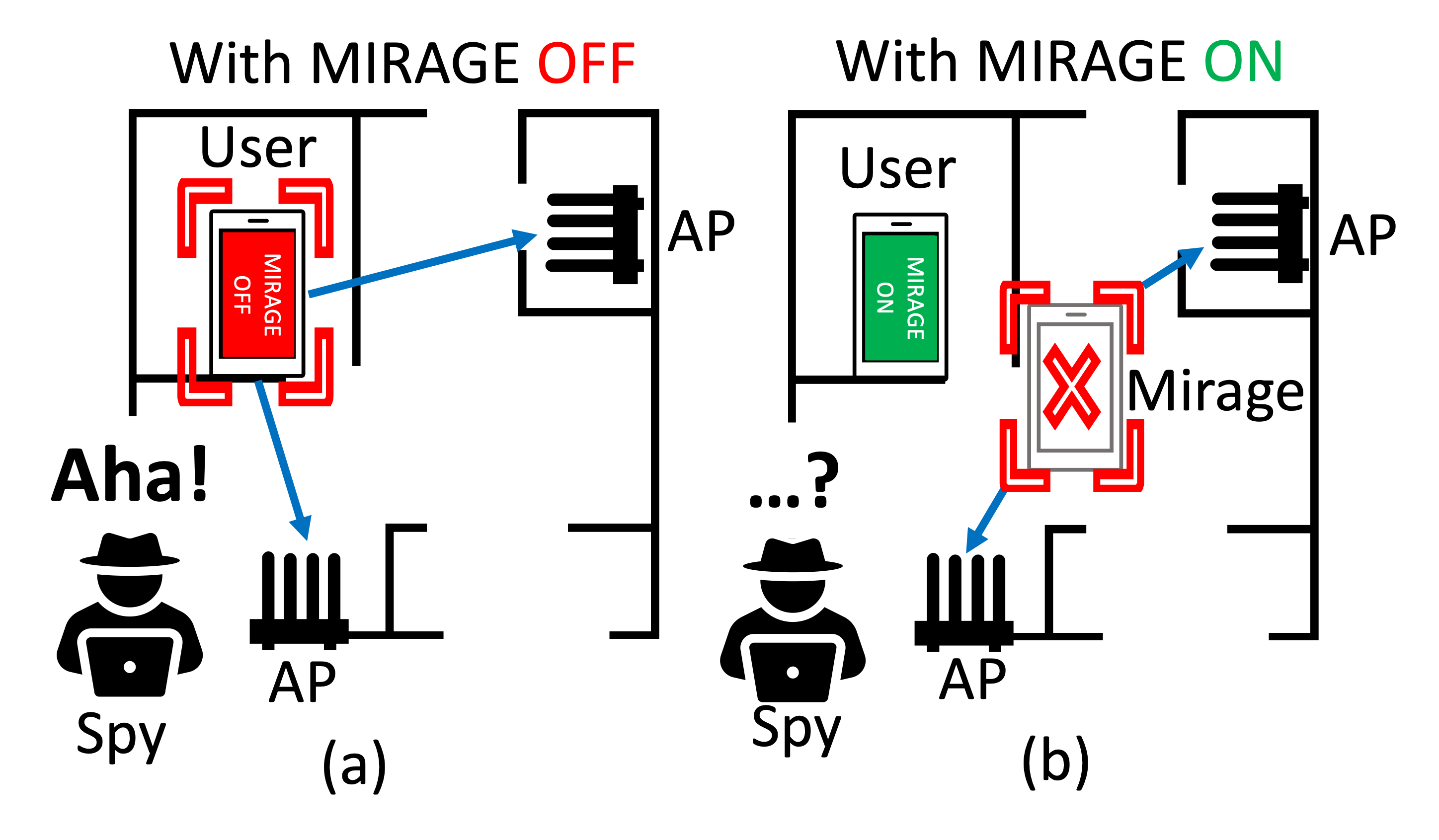
RF sensor data can pose serious security and privacy risks if compromised by attackers in XR and autonomous applications. To address this issue, we developed MIRAGE, the first RF-privacy tool that allows users to distort RF-sensor data without leaving any traces of distortion.
- Users are Closer than they Appear: Protecting User Location from WiFi APs
Roshan Ayyalasomayajula, Aditya Arun , Wei Sun, Dinesh Bharadia
HotMobile, 2023
Presented at Hotmobile, 2023
[Paper]-[Poster]
Deep-Learning and Context assisted Indoor Wireless localization
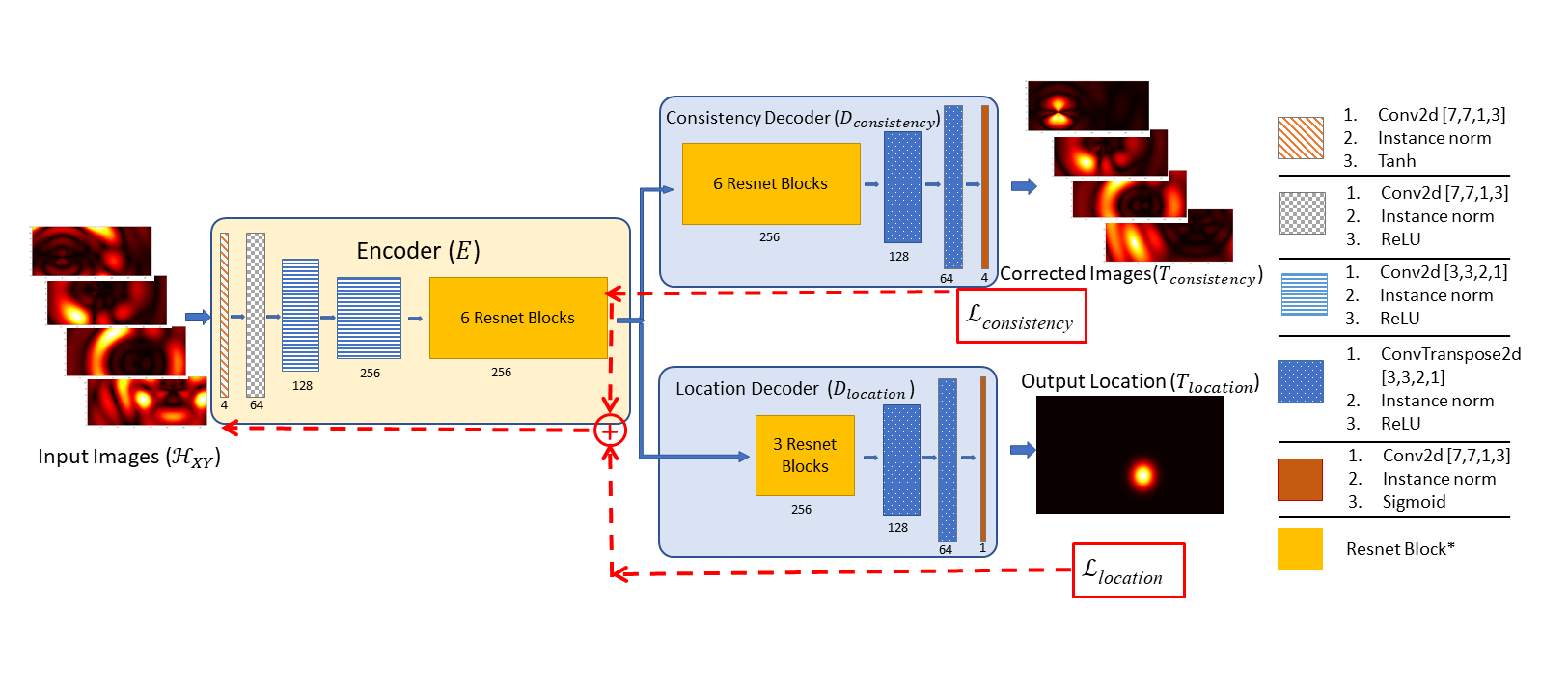
There has been a lot of work in Indoor WiFi localization in the past decade, with none of them being deployed in real-world. With this project we intend to bridge the gap between the real-world maps and the WiFi maps and enable deep-learning based solution by allowing large scale data-collection.
- Deep Learning based Wireless Localization for Indoor Navigation
Roshan Ayyalasomayajula, Aditya Arun , Chenfeng Wu, Sanatan Sharma, Abhishek Sethi Deepak Vasisht, Dinesh Bharadia
ACM Mobicom, 2020
[Paper]-[Slides]-[Video]-[Source]-[Datasets] - OpenSourcing: Wireless Indoor Localization Datasets (WILD)
Roshan Ayyalasomayajula, Aditya Arun , Chenfeng Wu, Dinesh Bharadia
[Datasets] - WAIP: Wireless AI Perception
Workshop at CVPR, 2022
[Website]-[Competition]
Accurate Wi-Fi Anchor Localization
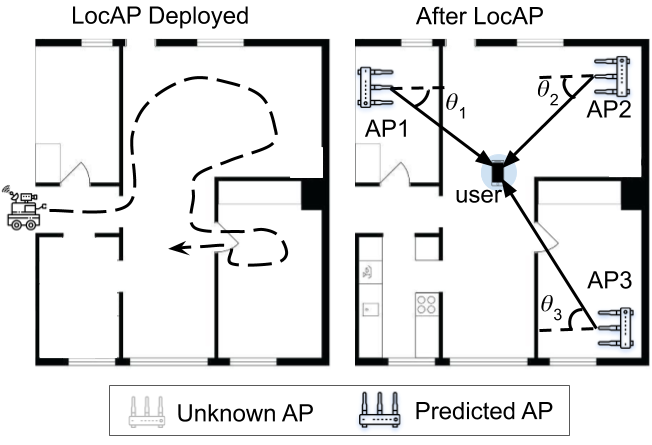
With the advent of CSI based WiFi localization, the indoor localization paradigm has come down to decimeter level accurate location estimates. While this remains the case, accuracy of anchor location, hitherto unsolved but an important parameter, is analyzed and solved in this research work.
BLE-based people interaction monitoring
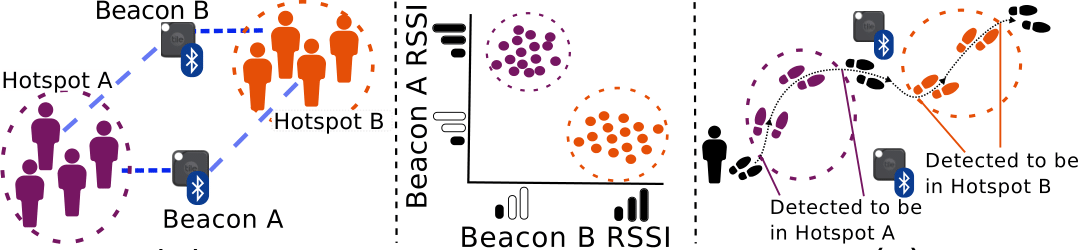
BluBLE, using Bluetooth Low Energy (BLE) mobile sensing, monitors COVID-19 social distancing through spatial and temporal formulations. It enforces a 6-foot distance and identifies high-occupancy hotspots in buildings. BluBLE achieved over 80% accuracy in predicting proximity and characterizing hotspot locations.
- Poster Abstract: BluBLE, Space-time social distancing to monitor the spread of COVID-19
Aditya Arun, Agrim Gupta, Shivani Bhatka, Saikiran Komatineni, Dinesh Bharadia
Sensys, 2020
[Paper]