2026
 Ali Mamaghani, Ushasi Ghosh, Ish Kumar Jain, Srinivas Shakkottai, Dinesh Bharadia
Ali Mamaghani, Ushasi Ghosh, Ish Kumar Jain, Srinivas Shakkottai, Dinesh Bharadia Rohith Reddy Vennam, Luke Wilson, Ish Kumar Jain, and Dinesh Bharadia
Rohith Reddy Vennam, Luke Wilson, Ish Kumar Jain, and Dinesh Bharadia
2025
 Qingyuan Zheng, Ushasi Ghosh, Ali Mamaghani, Srinivas Shakkottai, Dinesh Bharadia
Qingyuan Zheng, Ushasi Ghosh, Ali Mamaghani, Srinivas Shakkottai, Dinesh Bharadia Ali Mamaghani, Qingyuan Zheng, Ushasi Ghosh, Vicram Rajagopalan, Srinivas Shakkottai, Dinesh Bharadia
Ali Mamaghani, Qingyuan Zheng, Ushasi Ghosh, Vicram Rajagopalan, Srinivas Shakkottai, Dinesh Bharadia Ishan Bansal, Nagarjun Bhat, Agrim Gupta, Harine Govindarajan, Dinesh Bharadia
Ishan Bansal, Nagarjun Bhat, Agrim Gupta, Harine Govindarajan, Dinesh Bharadia Satyam Srivastava, Jerry Li, Pushkal Mishra, Kshitiz Bansal, Dinesh Bharadia
Satyam Srivastava, Jerry Li, Pushkal Mishra, Kshitiz Bansal, Dinesh Bharadia Ishan Bansal, Nagarjun Bhat, Agrim Gupta, Harine Govindarajan, Dinesh Bharadia
Ishan Bansal, Nagarjun Bhat, Agrim Gupta, Harine Govindarajan, Dinesh Bharadia Ishan Bansal, Nagarjun Bhat, Agrim Gupta, Harine Govindarajan, Dinesh Bharadia
Ishan Bansal, Nagarjun Bhat, Agrim Gupta, Harine Govindarajan, Dinesh Bharadia Pushkal Mishra, Satyam Srivastava, Jerry Li, Kshitiz Bansal, Dinesh Bharadia
Pushkal Mishra, Satyam Srivastava, Jerry Li, Kshitiz Bansal, Dinesh Bharadia Adel Heidari, Agrim Gupta, Ish Kumar Jain, Dinesh Bharadia
Adel Heidari, Agrim Gupta, Ish Kumar Jain, Dinesh Bharadia
2024
 Agrim Gupta, Adel Heidari, Avyakta Kalipattapu, Ish Kumar Jain, Dinesh Bharadia
Agrim Gupta, Adel Heidari, Avyakta Kalipattapu, Ish Kumar Jain, Dinesh Bharadia Ish Kumar Jain, Suriyaa MM, and Dinesh Bharadia
Ish Kumar Jain, Suriyaa MM, and Dinesh Bharadia Ishan Bansal, Nagarjun Bhat, Agrim Gupta, Harine Govindarajan, Dinesh Bharadia
Ishan Bansal, Nagarjun Bhat, Agrim Gupta, Harine Govindarajan, Dinesh Bharadia Nagarjun Bhat, Agrim Gupta, Ishan Bansal, Harine Govindarajan, Dinesh Bharadia
Nagarjun Bhat, Agrim Gupta, Ishan Bansal, Harine Govindarajan, Dinesh Bharadia Ushasi Ghosh, Azuka Chiejina, Nathan Stephenson, Vijay Shah, Srinivas Shakkottai, Dinesh Bharadia
Ushasi Ghosh, Azuka Chiejina, Nathan Stephenson, Vijay Shah, Srinivas Shakkottai, Dinesh Bharadia Archana Bura, Ushasi Ghosh, Srinivas Shakkottai, Dinesh Bharadia
Archana Bura, Ushasi Ghosh, Srinivas Shakkottai, Dinesh Bharadia Rohith Reddy Vennam, Ish Kumar Jain, Nagarjun Bhat, Suriyaa Muruganandan and Dinesh Bharadia
Rohith Reddy Vennam, Ish Kumar Jain, Nagarjun Bhat, Suriyaa Muruganandan and Dinesh Bharadia Aditya Arun, William Hunter, Roshan Ayyalasomayajula, Dinesh Bharadia
Aditya Arun, William Hunter, Roshan Ayyalasomayajula, Dinesh Bharadia Srivatsan Rajagopal, Radhika Mathuria and Dinesh Bharadia
Srivatsan Rajagopal, Radhika Mathuria and Dinesh Bharadia Radhika Mathuria, Srivatsan Rajagopal and Dinesh Bharadia
Radhika Mathuria, Srivatsan Rajagopal and Dinesh Bharadia Hari Prasad Sankar, Raghav Subbaraman, Tianyi Hu, Dinesh Bharadia
Hari Prasad Sankar, Raghav Subbaraman, Tianyi Hu, Dinesh Bharadia Woo Hyun Ko, Ushasi Ghosh, Ujwal Dinesha, Raini Wu, Srinivas Shakkottai, Dinesh Bharadia
Woo Hyun Ko, Ushasi Ghosh, Ujwal Dinesha, Raini Wu, Srinivas Shakkottai, Dinesh Bharadia Agrim Gupta, Adel Heidari, Jiaming Jin, Dinesh Bharadia
Agrim Gupta, Adel Heidari, Jiaming Jin, Dinesh Bharadia Frederik Zumegen, Ish Kumar Jain, and Dinesh Bharadia
Frederik Zumegen, Ish Kumar Jain, and Dinesh Bharadia
2023
 Kshitiz Bansal, Gautham Reddy, Dinesh Bharadia
Kshitiz Bansal, Gautham Reddy, Dinesh Bharadia Aditya Arun*, Shunsuke Saruwatari*, Sureel Shah, Dinesh Bharadia
Aditya Arun*, Shunsuke Saruwatari*, Sureel Shah, Dinesh Bharadia Hadi Givehchian, Nishant Bhaskar, Alexander Redding, Han Zhao, Aaron Schulman, Dinesh Bharadia
Hadi Givehchian, Nishant Bhaskar, Alexander Redding, Han Zhao, Aaron Schulman, Dinesh Bharadia Raghav Subbaraman, Kevin Mills, Aaron Schulman, Dinesh Bharadia
Raghav Subbaraman, Kevin Mills, Aaron Schulman, Dinesh Bharadia Agrim Gupta, Sajjad Nassirpour, Manideep Dunna, Eamon Patamasing, Alireza Vahid, Dinesh Bharadia
Agrim Gupta, Sajjad Nassirpour, Manideep Dunna, Eamon Patamasing, Alireza Vahid, Dinesh Bharadia Richard Bell, Kyle Wason, Tianyi Hu, Isamu Poy, Fred Harris, Dinesh Bharadia
Richard Bell, Kyle Wason, Tianyi Hu, Isamu Poy, Fred Harris, Dinesh Bharadia Agrim Gupta, Daegue Park, Shayaun Bashar, Cedric Girerd, Nagarjun Bhat, Siddhi Mundhra, Tania Morimoto, Dinesh Bharadia
Agrim Gupta, Daegue Park, Shayaun Bashar, Cedric Girerd, Nagarjun Bhat, Siddhi Mundhra, Tania Morimoto, Dinesh Bharadia Kshitiz Bansal, Manideep Dunna, Sanjeev Ganesh, Eamon Patmasing, Dinesh Bharadia
Kshitiz Bansal, Manideep Dunna, Sanjeev Ganesh, Eamon Patmasing, Dinesh Bharadia Rohith Reddy Vennam, Ish Kumar Jain, Kshitiz Bansal, Joshua Orozco, Puja Shukla, Aanjhan Ranganathan, Dinesh Bharadia
Rohith Reddy Vennam, Ish Kumar Jain, Kshitiz Bansal, Joshua Orozco, Puja Shukla, Aanjhan Ranganathan, Dinesh Bharadia William Hunter*, Aditya Arun*, Dinesh Bharadia
William Hunter*, Aditya Arun*, Dinesh Bharadia Roshan Ayyalasomayajula, Wei Sun, Aditya Arun, Dinesh Bharadia
Roshan Ayyalasomayajula, Wei Sun, Aditya Arun, Dinesh Bharadia Shihkai Kuo, Manideep Dunna, Patrick P. Mercier, Dinesh Bharadia
Shihkai Kuo, Manideep Dunna, Patrick P. Mercier, Dinesh Bharadia Ish Kumar Jain, Rohith Reddy Vennam, Raghav Subbaraman, and Dinesh Bharadia
Ish Kumar Jain, Rohith Reddy Vennam, Raghav Subbaraman, and Dinesh Bharadia- Ish Kumar Jain, Rohith Reddy Vennam, Raghav Subbaraman, and Dinesh Bharadia
2022
 Agrim Gupta, Ish Jain, Dinesh Bharadia
Agrim Gupta, Ish Jain, Dinesh Bharadia Richard Bell, Radhika Mathuria, Fred Harris, Peter Gerstoft, Dinesh Bharadia
Richard Bell, Radhika Mathuria, Fred Harris, Peter Gerstoft, Dinesh Bharadia Tian Qiu, Ish Kumar Jain, Raini Wu, Dinesh Bharadia, Pamela Cosman
Tian Qiu, Ish Kumar Jain, Raini Wu, Dinesh Bharadia, Pamela Cosman Ali Nikoofard, Hadi Givehchian, Nishant Bhaskar, Aaron Schulman, Dinesh Bharadia, Patrick P. Mercier
Ali Nikoofard, Hadi Givehchian, Nishant Bhaskar, Aaron Schulman, Dinesh Bharadia, Patrick P. Mercier Raghav Subbaraman, Yeswanth Guntupalli, Shruti Jain, Rohit Kumar, Krishna Chintalapudi, Dinesh Bharadia
Raghav Subbaraman, Yeswanth Guntupalli, Shruti Jain, Rohit Kumar, Krishna Chintalapudi, Dinesh Bharadia Hadi Givehchian, Nishant Bhaskar, Eliana Rodriguez Herrera, Héctor Rodrigo López Soto, Christian Dameff, Dinesh Bharadia, Aaron Schulman
Hadi Givehchian, Nishant Bhaskar, Eliana Rodriguez Herrera, Héctor Rodrigo López Soto, Christian Dameff, Dinesh Bharadia, Aaron Schulman Shihkai Kuo, Manideep Dunna, Patrick P. Mercier, Dinesh Bharadia
Shihkai Kuo, Manideep Dunna, Patrick P. Mercier, Dinesh Bharadia Aditya Arun, Roshan Ayyalasomayajula, William Hunter, Dinesh Bharadia
Aditya Arun, Roshan Ayyalasomayajula, William Hunter, Dinesh Bharadia
2021
 Minghui Zhao, Tyler Chang, Aditya Arun, Roshan Ayyalasomayajula, Chi Zhang, Dinesh Bharadia
Minghui Zhao, Tyler Chang, Aditya Arun, Roshan Ayyalasomayajula, Chi Zhang, Dinesh Bharadia Ish Kumar Jain, Raghav Subbaraman, Dinesh Bharadia
Ish Kumar Jain, Raghav Subbaraman, Dinesh Bharadia Agrim Gupta, Cédric Girerd, Manideep Dunna, Qiming Zhang, Raghav Subbaraman, Tania Morimoto, Dinesh Bharadia
Agrim Gupta, Cédric Girerd, Manideep Dunna, Qiming Zhang, Raghav Subbaraman, Tania Morimoto, Dinesh Bharadia Manideep Dunna, Miao Meng, Po-Han Wang, Chi Zhang, Patrick Mercier, Dinesh Bharadia
Manideep Dunna, Miao Meng, Po-Han Wang, Chi Zhang, Patrick Mercier, Dinesh Bharadia Miao Meng, Manideep Dunna, Hans Yu, Shikhai Kuo, Pohan Peter Wang, Dinesh Bharadia, Patrick P. Mercier
Miao Meng, Manideep Dunna, Hans Yu, Shikhai Kuo, Pohan Peter Wang, Dinesh Bharadia, Patrick P. Mercier
2020
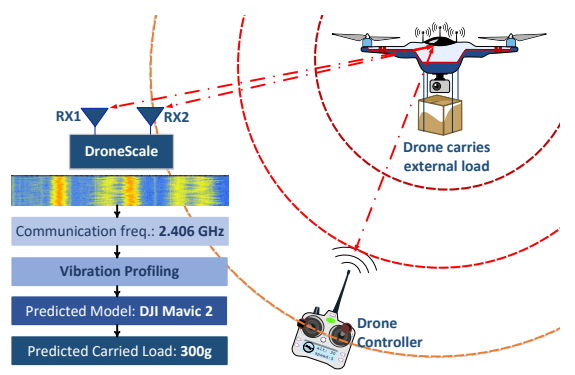 Phuc Nguyen, Vimal Kakaraparthi, Nam Bui, Nikshep Umamahesh, Nhat Pham, Hoang Truong, Yeswanth Guddeti, Dinesh Bharadia, Eric Frew, Richard Han, Daniel Massey, Tam Vu
Phuc Nguyen, Vimal Kakaraparthi, Nam Bui, Nikshep Umamahesh, Nhat Pham, Hoang Truong, Yeswanth Guddeti, Dinesh Bharadia, Eric Frew, Richard Han, Daniel Massey, Tam Vu Kshitiz Bansal, Keshav Rungta, Siyuan Zhu, Dinesh Bharadia
Kshitiz Bansal, Keshav Rungta, Siyuan Zhu, Dinesh Bharadia Ish Kumar Jain, Raghav Subbaraman, Tejas Harekrishna Sadarahalli, Xiangwei Shao, Hou-Wei Lin, Dinesh Bharadia
Ish Kumar Jain, Raghav Subbaraman, Tejas Harekrishna Sadarahalli, Xiangwei Shao, Hou-Wei Lin, Dinesh Bharadia Roshan Ayyalasomayajula, Aditya Arun, Chenfeng Wu, Sanatan Sharma, Abhishek Sethi, Deepak Vasisht, Dinesh Bharadia
Roshan Ayyalasomayajula, Aditya Arun, Chenfeng Wu, Sanatan Sharma, Abhishek Sethi, Deepak Vasisht, Dinesh Bharadia Manideep Dunna, Chi Zhang, Daniel Sievenpiper, Dinesh Bharadia
Manideep Dunna, Chi Zhang, Daniel Sievenpiper, Dinesh Bharadia Bin Cheng, Inderjot Singh Saggu, Raunak Shah, Gaurav Bansal, Dinesh Bharadia
Bin Cheng, Inderjot Singh Saggu, Raunak Shah, Gaurav Bansal, Dinesh Bharadia Po-Han Peter Wang, Chi Zhang, Hongsen Yang, Dinesh Bharadia, Patrick P. Mercier
Po-Han Peter Wang, Chi Zhang, Hongsen Yang, Dinesh Bharadia, Patrick P. Mercier Roshan Ayyalasomayajula, Aditya Arun, Chenfeng Wu, Shrivatsan Rajagopalan, Shreya Ganesaraman, Aravind Seetharaman, Ish Kumar Jain, Dinesh Bharadia
Roshan Ayyalasomayajula, Aditya Arun, Chenfeng Wu, Shrivatsan Rajagopalan, Shreya Ganesaraman, Aravind Seetharaman, Ish Kumar Jain, Dinesh Bharadia
2019
 Yue Meng, Yongxi Lu, Aman Raj, Samuel Sunarjo, Rui Guo, Tara Javidi, Gaurav Bansal, Dinesh Bharadia
Yue Meng, Yongxi Lu, Aman Raj, Samuel Sunarjo, Rui Guo, Tara Javidi, Gaurav Bansal, Dinesh Bharadia Chi Zhang, Siddharth Kumar, Dinesh Bharadia
Chi Zhang, Siddharth Kumar, Dinesh Bharadia Moein Khazraee, Yeswanth Guddeti, Sam Crow, Alex C. Snoeren, Kirill Levchenko, Dinesh Bharadia, Aaron Schulman
Moein Khazraee, Yeswanth Guddeti, Sam Crow, Alex C. Snoeren, Kirill Levchenko, Dinesh Bharadia, Aaron Schulman Yeswanth Guddeti, Raghav Subbaraman, Moein Khazraee, Aaron Schulman, Dinesh Bharadia
Yeswanth Guddeti, Raghav Subbaraman, Moein Khazraee, Aaron Schulman, Dinesh Bharadia
2018
 Roshan Ayyalasomayajula, Deepak Vasisht, Dinesh Bharadia
Roshan Ayyalasomayajula, Deepak Vasisht, Dinesh Bharadia